耐环境型 二进制码输出・格雷码输出转换器 NCV-20H
产品概要

NCV-20H是NSD的位置传感器ABSOCODER的转换器。通过与ABSOCODER传感器配套使用,以二进制码・格雷码输出位置信息。
![]()
![]()
型号选定
NCV-20H[1]N[2]
- [1]输出代码
-
代码 输出代码 B 二进制码 G 格雷码
- [2]传感器
-
代码 传感器 V1R VRE-P061/074/101 V2 VRE-16TS100 M2R MRE-32SP061/074/101,
MRE-G□SP061/074/101
系统构成


规格
一般规格
| 项目 | 规格 |
|---|---|
| 电源电压 | DC24V±10% (含波纹) |
| 耗电量 | 7W以下 |
| 绝缘电阻 | 20MΩ以上 (DC500V Mega) [DC电源端子整体到接地间] |
| 耐电压 | AC500V 60Hz 1分钟[DC电源端子整体到接地间] |
| 耐振动 | 20m/s2 10〜500Hz・5分×10周期・3方向(符合JIS C0040) |
| 使用时周围温度 | 0〜+55℃ (不可冻结) |
| 使用时周围湿度 | 20〜90%RH (不可凝结) |
| 接地 | D种接地 (第3种接地) |
| 构造 | 配电柜内置书架型,可连接DIN导轨 |
| 外形尺寸(mm) | 39(W)×155(H)×93(D) |
| 质量 | 约0.4kg |
性能规格
| 项目 | 规格 | ||
|---|---|---|---|
| 型号 | NCV-20HBNV1R, NCV-20HGNV1R NCV-20HBNV2, NCV-20HGNV2 NCV-20HBNM2R, NCV-20HGNM2R |
||
| 检测轴数 | 1 | ||
| 位置数据采样时间 | 0.2ms | ||
| 状态输出信号 | 锁存脉冲 (位置数据读取周期信号) : 1点 传感器未连接异常 (正逻辑) : 1点 传感器未连接异常 (负逻辑) : 1点 |
||
| 输入信号 | 位置数据保持信号 : 1点 | ||
| 控制器操作面板操作功能 | 当前位置设定 | ||
| 开关 (产品背面) | 位置数据增加方向 (CW/CCW) 设定 : 1点 | ||
| 位置数据更行周期 | 高速 | 0.2ms | |
| 0.4ms | |||
| 低速 | 12.8ms | ||
| 25.6ms | |||
| 51.2ms | |||
| 保持信号格式 | 透明格式 | ||
| PC同步格式 | |||
| 监测器LED | 传感器未连接异常显示,位置数据显示, 锁存脉冲输出显示,保持输入信号状态显示 |
||
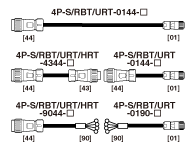
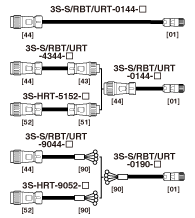
ABSOCODER传感器的分割数・分辨率・电缆长度
VRE 单圈型
| 项目 | 规格 | ||
|---|---|---|---|
| 型号 | NCV-20HBNV1R, NCV-20HGNV1R | NCV-20HBNV2, NCV-20HGNV2 | |
| 适用传感器 | VRE-P061, VRE-P074, VRE-P101 | VRE-16TS100 | |
| 总旋转圈数 | 1 | ||
| 分割数 | 8192(213) | 65536(216) | |
| 位置检测方式 | 绝对值方式 | ||
| 最大传感器电缆长 | 标准电缆(S) | 500m | 200m |
| 机器人电缆(RBT) | 250m | 100m | |
| JKPEV-S电缆 (1.25mm2×5P) |
300m | - | |
MRE 多圈型
| 项目 | 规格 | ||||||
|---|---|---|---|---|---|---|---|
| 型号 | NCV-20HBNM2R, NCV-20HGNM2R | ||||||
| 适用传感器 | MRE-32SP061 | MRE-G□SP061 □:总旋转圈数 | |||||
| 总旋转圈数 | 32 | 64 | 128 | 160 | 256 | 320 | |
| 单旋转分割数 | 2048 | 1024 | 512 | 409.6 | 256 | 204.8 | |
| 总分割数 | 65536(216) | ||||||
| 位置检测方式 | 绝对值方式 | ||||||
| 最大传感器电缆长 | 标准电缆(S) | 200m | 300m | ||||
| 机器人电缆(RBT) | 100m | 150m | |||||
| JKPEV-S电缆 (1.25mm2×5P) |
200m | 300m | |||||
| 项目 | 规格 | ||||||
|---|---|---|---|---|---|---|---|
| 型号 | NCV-20HBNM2R, NCV-20HGNM2R | ||||||
| 适用传感器 | MRE-32SP074 | MRE-G□SP074 □:总旋转圈数 | |||||
| 总旋转圈数 | 32 | 64 | 128 | 160 | 256 | 320 | |
| 单旋转分割数 | 2048 | 1024 | 512 | 409.6 | 256 | 204.8 | |
| 总分割数 | 65536(216) | ||||||
| 位置检测方式 | 绝对值方式 | ||||||
| 最大传感器电缆长 | 标准电缆(S) | 300m | |||||
| 机器人电缆(RBT) | 150m | ||||||
| JKPEV-S电缆 (1.25mm2×5P) |
300m | ||||||
| 项目 | 规格 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 型号 | NCV-20HBNM2R, NCV-20HGNM2R | |||||||||||
| 适用传感器 | MRE-32SP101 | MRE-G□SP101 □:总旋转圈数 | ||||||||||
| 总旋转圈数 | 32 | 64 | 128 | 160 | 256 | 320 | 512 | 1280 | 2048 | 2560 | 3072 | |
| 单旋转分割数 | 2048 | 1024 | 512 | 409.6 | 256 | 204.8 | 128 | 51.2 | 32 | 25.6 | 21.3 | |
| 总分割数 | 65536(216) | |||||||||||
| 位置检测方式 | 绝对值方式 | |||||||||||
| 最大传感器电缆长 | 标准电缆(S) | 300m | ||||||||||
| 机器人电缆(RBT) | 150m | |||||||||||
| JKPEV-S电缆 (1.25mm2×5P) |
300m | |||||||||||
输入输出规格
| 项目 | 规格 | ||||
|---|---|---|---|---|---|
| 型号 | NCV-20HBNV1R NCV-20HGNV1R |
NCV-20HBNV2 NCV-20HGNV2 |
NCV-20HBNM2R NCV-20HGNM2R |
||
| 输入 | 输入信号 | HD (位置数据保持) : 1点 | |||
| 输入电路 | DC输入,光耦隔离 | ||||
| 输入逻辑 | 负逻辑 | ||||
| 额定输入电压 | DC24V ±10% | ||||
| 额定输入电流 | 10mA | ||||
| ON电压 | DC10V以上 | ||||
| OFF电压 | DC4V以下 | ||||
| 输出 | 输出信号 | 位置数据 | D0〜D12:13点 | D0〜D15:16点 | D0〜D15:16点 |
| LP (锁存脉冲:位置数据读取周期) : 1点 SE,SE (传感器未连接异常) : 2点 |
|||||
| 输出电路 | 晶体管 (开集) 输出,光耦隔离 | ||||
| 输出逻辑 | D0〜D15,LP,SE:负逻辑 SE:正逻辑 |
||||
| 额定负载电压 | DC24V (DC30V Max.) | ||||
| 最大负载电流 | D0〜D15,LP:10 mA/点 SE, SE:100 mA/点*1 | ||||
| ON时最大电压降 | 0.8V以下 | ||||
*1 : SE、SE的输出信号需要外部供给电源 (DC 24 V±10%)
外形图
应用介绍


 海外销售网络
海外销售网络- NSD是可以满足客户需求的地方。
 ABSOCODER的工作原理
ABSOCODER的工作原理- 关于ABSOCODER的工作原理的解说。
 历史
历史- 介绍NSD的企业历史文化。
 用途・案例介绍
用途・案例介绍- 使用ABSOCODER应用的时候,请参考这页的内容。
 延长传感器电缆
延长传感器电缆- 连接ABSOCODER传感器和转换器的电缆。
 NSD YouTube频道
NSD YouTube频道- 介绍NSD官方YouTube频道。
 在线展销会
在线展销会- 介绍NSD在线展销会。