SPS Modulkonverter
Produktbeschreibung

SPS Modulkonverter werden direkt in die SPS-Einheit eingesteckt und sind direkt mir Ihr verbunden.
Der Konverter wird and die SPS-Basiseinheit montiert und die Positionserkennung und Positionierung kann einfach mit der vorhandenen SPS realisiert werden.
![]()
VS-R262B
VS-R262B ist der NSD Einbau-Konverter für die Mitsubishi SPS-Einheit MELSEC iQ-R-Serie.
Laden Sie das Profil (CSP+) für MELSEC iQ-R von der Download-Seite herunter (Open Network Definition File).
Bei Fragen zu den Spezifierungen können Sie uns jederzeit kontaktieren.

Verwendbares System
-
Programmierbare
Kontroller CPUR00CPU R01CPU R02CPU R04CPU R08CPU R16CPU R32CPU R120CPU R04ENCPU R08ENCPU R16ENCPU R32ENCPU R120ENCPU Prozess CPU R08PCPU R16PCPU R32PCPU R120PCPU Sicherheits CPU R08SFCPU R16SFCPU R32SFCPU R120SFCPU C Kontroller R12CCPU-V Remote head unit RJ72GF15-T2
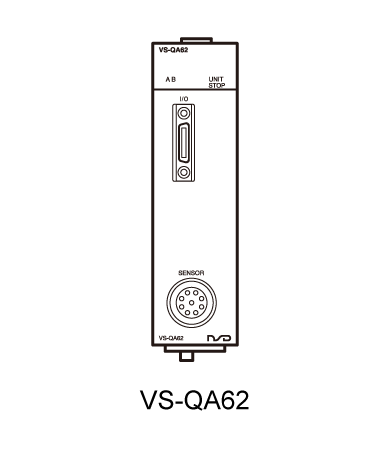
VS-QA62
VS-QA62 ist eine integrierte intelligente SPS-Steuerung für die MELSEC-Q-Serie von Mitsubishi, die ohne Verkabelung direkt im SPS-Modul installiert wird.
VS-QA62 bietet Systembewegungssteuerung mit Endschalteroutput und alle Parameter können von der NSD-Programmiersoftware mit Ihrem PC eingestellt werden.

Modellauswahl
VS-QA62-[1]
- [1]Verwendbarer Sensor
-
Code Verwendbarer Sensor M2PG MRE-32SP062/MRE-G□SP062(□ : 64/128/160/256/320) L VLS-256PWB/VLS-512PWB/VLS-1024PW Bei Fragen zu den Spezifierungen können Sie uns jederzeit kontaktieren.
Verwendbares System
-
Programmierbare
Kontroller
CPUQ00JCPU Q00CPU Q01CPU Q02CPU Q02HCPU Q06HCPU Q12HCPU Q25HCPU Q02PHCPU Q06PHCPU Q12PHCPU Q25PHCPU Q04UDPVCPU Q06UDPVCPU Q13UDPVCPU Q26UDPVCPU Q12PRHCPU Q25PRHCPU Q00UJCPU Q00UCPU Q01UCPU Q02UCPU Q03UDCPU Q04UDHCPU Q06UDHCPU Q10UDHCPU Q13UDHCPU Q20UDHCPU Q26UDHCPU Q03UDECPU Q04UDEHCPU Q06UDEHCPU Q10UDEHCPU Q13UDEHCPU Q20UDEHCPU Q26UDEHCPU Q50UDEHCPU Q100UDEHCPU Q03UDVCPU Q04UDVCPU Q06UDVCPU Q13UDVCPU Q26UDVCPU Q06CCPU-V Q06CCPU-V-B Q12DCCPU-V Q24DHCCPU-V Q24DHCCPU-LS Q01WCPU-W1-J Q01WCPU-W1-CF-J Q01WCPU-W1-E Q01WCPU-W1-CF-E PPC-100-DC5511 PPC-100-DC5311 Remote Input/Output
ModulQJ72LP25-25 QJ72LP25G QJ72BR15
ABSOCODER Basiskonfiguration


Spezifikationen
Allgemeine Spezifikationen
| Kategorie | Spezifikationen | ||||
|---|---|---|---|---|---|
| Umgebungsbetriebstemperatur | 0 ~ +55℃ (Keine Kondensierung oder Frost) | ||||
| Vibrationswiederstand | Gemäß JIS B3502 und IEC 61131-2 | Bei intermittierenden Vibrationen | Anzahl der Sweeps | ||
| Frequenz | Beschleunigung | Amplitude | 10 mal in 3 Richtungen (X, Y, Z) ( 80 min lang) | ||
| 10 ~ 57Hz | - | 0,075mm | |||
| 57 ~ 150Hz | 9,8m/s2 (1G) | - | |||
| Bei beständigen Vibrationen | |||||
| Frequenz | Beschleunigung | Amplitude | |||
| 10 ~ 57Hz | - | 0,035mm | |||
| 57 ~ 150Hz | 4,9m/s2 (0,5G) | - | |||
| Schockwiederstand | Gemäß JIS B3502 und IEC 61131-2 (147 m/s2 (15G), 3 mal in 3 Richtungen (X, Y, Z)) | ||||
| Betriebsumgebung | Frei von ätzenden Gasen | ||||
| Betriebshöhe | 2000m oder weniger | ||||
| Überspannungskategorie | 2 oder weniger | ||||
| Verschmutzungsgrad | 2 oder weniger | ||||
| Interner Stromverbrauch | 0,7A (5VDC) | ||||
| Gewicht | 0,2kg | ||||
Leistungsspezifikationen
| Kategorie | Spezifikationen | ||||
|---|---|---|---|---|---|
| Modell | VS-QA62-M2PG | VS-QA62-L | |||
| Verwendbarer Sensor | MRE-32SP062 | MRE-G□SP062 | VLS-□PW | ||
| Positionserfassungsformat | Absolute Positionserfassung | ||||
| Anzahl der Teilungen | 4096 Teilungen×32 Umdrehungen ~ 409,6 Teilungen×320 Umdrehungen |
256 ~ 1024mm/65536 Teilungen | |||
| Anzahl der Erfassungsachsen | 1 | ||||
| Dateneinstellungsmethode | SPS CPU Programm | ||||
| Positionierungsfunktion (Geschwindigkeits- umschaltsteuerung) |
Kontrollformat | Unidirektionale Positionierung oder bidirektionale Positionierung | |||
| Kontrolloutput | Vorwärts (FWD), Rückwärts (RVS), Hochgeschwindigkeit, Niedriggeschwindigkeit, Bremsfreigabe, In-Position, Positionierung in Bearbeitung, Betriebsfehler | ||||
| Positionierungsfunktion (Beschleunigungs-/ Entschleuningsfunktion) |
Kontrollformat | Unidirektionale Positionierung oder bidirektionale Positionierung | |||
| Kontrolloutput | Vorwärts (FWD), Rückwärts (RVS), Bremsfreigabe, In-Position, Positionierung in Bearbeitung, Betriebsfehler, Geschwindigkeitsbefehl | ||||
| Schalteroutputfunktion | Anzahl der Programme (angezeitgt auf dem Display) |
1 | |||
| Anzahl der Schalteroutputs |
Nur Schalteroutputfunktion I/O Output: 8 Punkte, Gerät X: 8 Punkte, Pufferspeicher: 16 Punkte Für Schalteroutput und Positionierungsfunktion I/O Output: 3 Punkte, Gerät X: 0 Punkte, Pufferspeicher: 16 Punkte |
||||
| Anzahl der Multi-Dogs | 5 mal für jedes Schalteroutput | ||||
| Erfassungszeit (Antwortzeit) |
Schalteroutput Positionierungsoutput |
0,4ms (0,8ms) | |||
| Aktuelles Positionsoutput | 0,2ms (0,4ms) | ||||
| Anzahl der belegenten Input/Output Punkte | 32 Punkte (intelligente Input/Output Funktion) | ||||
| Wertespeicher einstellbarer Werte | Nicht-flüchtiger Speicher | ||||
| Hilfsfunktionen | Erkennung der aktuellen Position, Positionierungsfunktion, Schalterausgänge, Aktuelle Positions-Voreinstellung, JOG-Betrieb | ||||
| max. Kabellänge | Standard | 100m | 100m | 100m | |
| Roboter | 40m | 70m | 50m | ||
Input / Output Spezifikationen
| Kategorie | Spezifikationen | |||
|---|---|---|---|---|
| Input | Inputsignal | Aktuelle Positionsvoreinstellungsinput 2 Punkte | ||
| Inputschaltung | DC Input, Fotokoppler-Isolation | |||
| Nenn-Inputsspannung | 12VDC | 24VDC | ||
| Inputsnennstrom | 3mA | 6,5mA | ||
| Betriebsspannungsbereich | 10,2 ~ 30VDC | |||
| ON Spannung | 10VDC oder mehr | |||
| OFF Spannung | 2VDC oder weniger | |||
| Common Verbindung | 1 Common für 2 Punkte (Common Terminal: 11, 12) | |||
| Output | Outputsignal | Nur für aktuelle Positionserfassung |
Kein Output | |
| Nur für die Schalteroutputfunktion |
Schalteroutput 8 Punkte | |||
| Nur für Schalteroutput und Positionierungsfunktion |
Schalteroutput 0 Punkte Positionierungsoutput 8 Punkte |
|||
| Outputschaltung | Fotokoppler-Isolation | |||
| Nennlastspannung | 12/24VDC | |||
| Ladungsspannungsbereich | 10,2 ~ 30VDC | |||
| max. Ladestrom | 50mA | |||
| max. Spannungsabfall wenn ON | 2,0V oder weniger bei 50mA, 1,7V oder weniger bei 10mA | |||
| Common Verbindung | 1 Common für 8 Punkte (Common Terminal: 24, 25) | |||
| Puls-Output | Outputsignal | A+/A-, B+/B- | ||
| Outputschaltung | Leitungstreiberausgang (Entspircht AM26C31) | |||
| max. Ladestrom | ±20mA max./1 Punkt | |||
| Differentielle Ausgangsspannung | 2.0V oder mehr (Io=20mA) | |||
| Isolationsmethode | Fotokoppler-Isolation | |||
| Mindest. Ladungswiderstand | 100Ω min. | |||
| Externe Versorgungsspannung *1 | 0.2 A(5VDC : 4.75 bis to 5.25VDC) | |||
| Max. Frequenz | 100 kHz | |||
| Analoges Output | Outputsignal | Analog+ / Analog- | ||
| Isolationsmethode | Fotokoppler-Isolation | |||
| Ausgangsspannungsbereich | -10V bis to +10VDC | |||
| Ausgangsspannungsauflösung | 0.3051mV (−10V bis to +10V / 65536 Teilungen) | |||
| Update-Zyklus | 0.4ms | |||
| Externes Kabelverbindungsformat | 26-Punkte Konnektor | |||
- *1: Für die Pulsausgangsschaltung ist eine externe Stromversorgung (5VDC) erforderlich.
Außenabmessungen
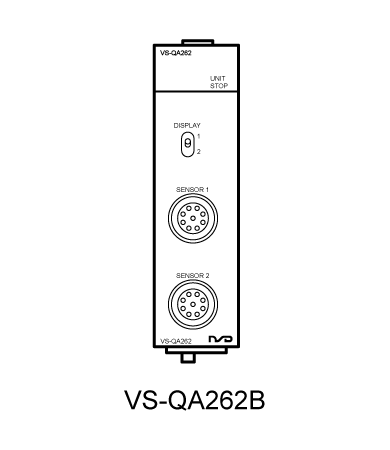
VS-QA262B
VS-QA262B ist eine integrierte und intelligente SPS-Steuerung für die MELSEC-Q-Serie mit 2 Sensorkanälen. Das Signal wird im Binärcode ausgegeben.

Modellauswahl
VS-QA262B-[1]
- [1]Verwendbarer Sensor
-
Code Verwendbarer Sensor V1PG VRE-P028/VRE-P062 V2 VRE-16TS062 M2PG MRE-32SP062/MRE-G□SP062(□ : 64/128/160/256/320) LC CSA Zylinder Bei Fragen zu den Spezifierungen können Sie uns jederzeit kontaktieren.
Verwendbares System
-
Programmierbare
Kontroller
CPUQ00JCPU Q00CPU Q01CPU Q02CPU Q02HCPU Q06HCPU Q12HCPU Q25HCPU Q02PHCPU Q06PHCPU Q12PHCPU Q25PHCPU Q04UDPVCPU Q06UDPVCPU Q13UDPVCPU Q26UDPVCPU Q12PRHCPU Q25PRHCPU Q00UJCPU Q00UCPU Q01UCPU Q02UCPU Q03UDCPU Q04UDHCPU Q06UDHCPU Q10UDHCPU Q13UDHCPU Q20UDHCPU Q26UDHCPU Q03UDECPU Q04UDEHCPU Q06UDEHCPU Q10UDEHCPU Q13UDEHCPU Q20UDEHCPU Q26UDEHCPU Q50UDEHCPU Q100UDEHCPU Q03UDVCPU Q04UDVCPU Q06UDVCPU Q13UDVCPU Q26UDVCPU Q06CCPU-V Q06CCPU-V-B Q12DCCPU-V Q24DHCCPU-V Q24DHCCPU-LS Q01WCPU-W1-J Q01WCPU-W1-CF-J Q01WCPU-W1-E Q01WCPU-W1-CF-E PPC-100-DC5511 PPC-100-DC5311 Remote Input/Output
ModulQJ72LP25-25 QJ72LP25G QJ72BR15
ABSOCODER Basiskonfiguration
Spezifikationen
Allgemeine Spezifikationen
| Kategorie | Spezifikationen | ||||
|---|---|---|---|---|---|
| Umgebungsbetriebstemperatur | 0 ~ +55℃ (Keine Kondensierung oder Frost) | ||||
| Vibrationswiederstand | Gemäß JIS B3502 und IEC 61131-2 | Bei intermittierenden Vibrationen | Anzahl der Sweeps | ||
| Frequenz | Beschleunigung | Amplitude | 10 mal in 3 Richtungen (X, Y, Z) ( 80 min lang) | ||
| 10 ~ 57Hz | - | 0,075mm | |||
| 57 ~ 150Hz | 9,8m/s2 (1G) | - | |||
| Bei beständigen Vibrationen | |||||
| Frequenz | Beschleunigung | Amplitude | |||
| 10 ~ 57Hz | - | 0,035mm | |||
| 57 ~ 150Hz | 4,9m/s2 (0,5G) | - | |||
| Schockwiederstand | Gemäß JIS B3502 und IEC 61131-2 (147 m/s2 (15G), 3 mal in 3 Richtungen (X, Y, Z)) | ||||
| Betriebsumgebung | Frei von ätzenden Gasen | ||||
| Betriebshöhe | 2000m oder weniger | ||||
| Überspannungskategorie | 2 oder weniger | ||||
| Verschmutzungsgrad | 2 oder weniger | ||||
| Interner Stromverbrauch | 0,7 A (5VDC) | ||||
| Gewicht | 0,2kg | ||||
Leistungsspezifikationen
| Kategorie | Spezifikationen | ||||
|---|---|---|---|---|---|
| Modell | VS-QA262B-M2PG | VS-QA262B-V1PG | VS-QA262B-V2 | ||
| Verwendbarer Sensor | MRE-32SP062 | MRE-G□SP062 | VRE-P028 VRE-P062 |
VRE-16TS062 | |
| Positionserfassungsformat | Absolute Positionserfassung | ||||
| Anzahl der Teilungen | 4096 Teilungen×32 Umdrehungen ~ 409,6 Teilungen×320 Umdrehungen |
8192 Teilungen×1 Umdrehung | 65536 Teilungen×1 Umdrehung | ||
| Anzahl der Erfassungsachsen | 2 | ||||
| Dateneinstellungsmethode | SPS CPU Programm | ||||
| Positionsdatenerfassungszeit | 0,4ms | ||||
| Antwortzeit | 0,8ms | ||||
| Anzahl der belegenten Input/Output Punkte |
32 Punkte (intelligente Input/Output Funktion) | ||||
| Wertespeicher einstellbarer Werte | Nicht-flüchtiger Speicher | ||||
| Hilfsfunktionen | Erkennung der aktuellen Position, Aktuelle Positionswerteinstellung | ||||
| max. Kabellänge | Standard | 100m | 100m | 100m | - |
| Roboter | 40m | 70m | 100m | 100m | |
| Kategorie | Spezifikationen | |
|---|---|---|
| Modell | VS-QA262B-LC | |
| Verwendbarer Sensor | CYLNUC CSA |
|
| Positionserfassungsformat | Semi-Absolute Positionserfassung | |
| Anzahl der Teilungen | 12,8mm/8192 Teilungen×Pitcheinheiten Zähler | |
| Anzahl der Erfassungsachsen | 2 | |
| Dateneinstellungsmethode | SPS CPU programm | |
| Positionsdatenerfassungszeit | 0,4ms | |
| Antwortzeit | 0,8ms | |
| Anzahl der belegenten Input/Output Punkte |
32 Punkte (intelligente Input/Output Funktion) | |
| Wertespeicher einstellbarer Werte | Nicht-flüchtiger Speicher | |
| Hilfsfunktionen | Erkennung der aktuellen Position, Aktuelle Positionswerteinstellung | |
| max. Kabellänge | Standard | 100m |
| Roboter | 50m | |
Außenabmessungen
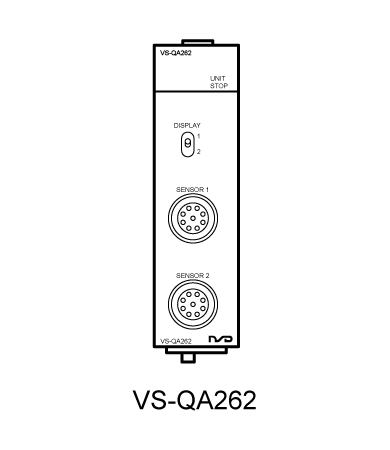
VS-QA262
VS-QA262 ist eine integrierte und intelligente SPS-Steuerung für die MELSEC-Q-Serie mit 2 Sensorkanälen.
Modellauswahl
VS-QA262-[1]
- [1]Verwendbarer Sensor
-
Code Verwendbarer Sensor M2PG MRE-32SP062/MRE-G□SP062(□ : 64/128/160/256/320) L VLS-256PWB/VLS-512PWB/VLS-1024PW Bei Fragen zu den Spezifierungen können Sie uns jederzeit kontaktieren.
Verwendbares System
-
Programmierbare
Kontroller
CPUQ00JCPU Q00CPU Q01CPU Q02CPU Q02HCPU Q06HCPU Q12HCPU Q25HCPU Q02PHCPU Q06PHCPU Q12PHCPU Q25PHCPU Q04UDPVCPU Q06UDPVCPU Q13UDPVCPU Q26UDPVCPU Q12PRHCPU Q25PRHCPU Q00UJCPU Q00UCPU Q01UCPU Q02UCPU Q03UDCPU Q04UDHCPU Q06UDHCPU Q10UDHCPU Q13UDHCPU Q20UDHCPU Q26UDHCPU Q03UDECPU Q04UDEHCPU Q06UDEHCPU Q10UDEHCPU Q13UDEHCPU Q20UDEHCPU Q26UDEHCPU Q50UDEHCPU Q100UDEHCPU Q03UDVCPU Q04UDVCPU Q06UDVCPU Q13UDVCPU Q26UDVCPU Q06CCPU-V Q06CCPU-V-B Q12DCCPU-V Q24DHCCPU-V Q24DHCCPU-LS Q01WCPU-W1-J Q01WCPU-W1-CF-J Q01WCPU-W1-E Q01WCPU-W1-CF-E PPC-100-DC5511 PPC-100-DC5311 Remote Input/Output
ModulQJ72LP25-25 QJ72LP25G QJ72BR15
ABSOCODER Basiskonfiguration
Spezifikationen
Allgemeine Spezifikationen
| Kategorie | Spezifikationen | ||||
|---|---|---|---|---|---|
| Umgebungsbetriebstemperatur | 0 ~ +55℃ (Keine Kondensierung oder Frost) | ||||
| Vibrationswiederstand | Gemäß JIS B3502 und IEC 61131-2 | Bei intermittierenden Vibrationen | Anzahl der Sweeps | ||
| Frequenz | Beschleunigung | Amplitude | 10 mal in 3 Richtungen (X, Y, Z) ( 80 min lang) | ||
| 10 ~ 57Hz | - | 0,075mm | |||
| 57 ~ 150Hz | 9,8m/s2 (1G) | - | |||
| Bei beständigen Vibrationen | |||||
| Frequenz | Beschleunigung | Amplitude | |||
| 10 ~ 57Hz | - | 0,035mm | |||
| 57 ~ 150Hz | 4,9m/s2 (0,5G) | - | |||
| Schockwiederstand | Gemäß JIS B3502 und IEC 61131-2 (147 m/s2 (15G), 3 mal in 3 Richtungen (X, Y, Z)) | ||||
| Betriebsumgebung | Frei von ätzenden Gasen | ||||
| Betriebshöhe | 2000m oder weniger | ||||
| Überspannungskategorie | 2 oder weniger | ||||
| Verschmutzungsgrad | 2 oder weniger | ||||
| Interner Stromverbrauch | 0,7 A (5VDC) | ||||
| Gewicht | 0,2kg | ||||
Leistungsspezifikationen
| Kategorie | Spezifikationen | |||
|---|---|---|---|---|
| Modell | VS-QA262-M2PG | VS-QA262-L | ||
| Verwendbarer Sensor | MRE-32SP062 | MRE-G□SP062 | VLS-□PW | |
| Positionserfassungsformat | Absolute Positionserfassung | |||
| Anzahl der Teilungen | 4096 Teilungen×32 Umdrehungen ~ 409,6 Teilungen×320 Umdrehungen |
256 ~ 1024mm/65536 Teilungen | ||
| Anzahl der Erfassungsachsen | 2 | |||
| Dateneinstellungsmethode | SPS CPU programm | |||
| Positionierungsfunktion | Kontrollformat | Unidirektionale Positionierung oder bidirektionale Positionierung | ||
| Kontrolloutput | Vorwärts (FWD), Rückwärts (RVS), Hochgeschwindigkeit, Niedriggeschwindigkeit, Bremsfreigabe, In-Position, Positionierung in Bearbeitung, Betriebsfehler | |||
| Schalteroutputfunktion | Anzahl der Programme (Panel-Display) |
9 | ||
| Anzahl der Schalteroutputs |
Nur Schalteroutputfunktion Gerät X: 8 Punkte Pufferspeicher: 16 Punkte |
|||
| Anzahl der Multi-Dogs | 10 mal für jedes Schalteroutput | |||
| Positionsdatenerfassungszeit | Schalteroutput Positionierungsoutput |
1,6ms | ||
| Aktuelles Positionsoutput | 0,8ms | |||
| Antwortzeit | Schalteroutput Positionierungsoutput |
3,2ms | ||
| Aktuelles Positionsoutput | 1,6ms | |||
| Anzahl der belegenten Input/Output Punkte | 32 Punkte (intelligente Input/Output Funktion) | |||
| Wertespeicher einstellbarer Werte | Nicht-flüchtiger Speicher | |||
| Hilfsfunktionen | Erkennung der aktuellen Position, Positionierungsfunktion, Schalterausgänge, Aktuelle Positions-Voreinstellung, JOG-Betrieb | |||
| max. Kabellänge | Standard | 100m | 100m | 100m |
| Roboter | 40m | 70m | 50m | |
Außenabmessungen

- Das Funktionsprinzip von ABSOCODER
- ABSOCODER Produktübersicht
- Konverter
- VARICAM®
- VARILIMIT®
- SPS Modulkonverter
- Netzwerkkontroller
- Netzwerkkontroller 2
- Positionierungskontroller
- Hochleistungskonverter
- Hochleistungspulskonverter ABSO PULPUL®
- Hochleistungs-
impulskonverter NP-SCALE - Hochleistungs-
endschalter Output Kontroller VARILIMIT® - Hochleistungs
SPS Modulkonverter - Hochleistungs-
netzwerkkontroller - Sonstige Produkte für die Schwerindustrie
- Single-Turn Drehgeber
- Multi-Turn Drehgeber
- Linearer Positionssensor
- Zylinder zur linearen Positionserfassung
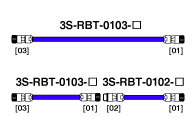
- Sensorenverlängerungskabel
- ezABSO® Puls-Typ
- ezABSO® Netzwerk-Typ
- Magnetischer Näherungssensor
- Zugkraftsensoren
- Wirbelstrom-Wegsensor
- Sensoren mit Explosionsschutz
- Gemeinsam entwickelte Produkte
- Schleifringe und drahtlose Übertragungsgeräte
- Produkterneuerung
- Kundenspezifische Lösungen
- Parameter Software


 Internationales Netzwerk
Internationales Netzwerk- NSD ist immer da wenn wir gebraucht werden.
 Das Funktionsprinzip von ABSOCODER
Das Funktionsprinzip von ABSOCODER- Einführung in das Funktionsprinzip des ABSOCODER.
 Unternehmens-
Unternehmens-
geschichte- Einführung in die Unternehmens-
geschichte der NSD Group.
 Anwendungs-
Anwendungs-
möglichkeiten- Hier finden Sie eine Übersicht über die Anwendungs-
möglichkeiten unseres ABSOCODERs.
 Sensorenverlängerungs-
Sensorenverlängerungs-
kabel- Hier finden Sie einen Überblick über unsere Sensorenverlängerungs-
kabel.
 NSD YouTube-Kanal
NSD YouTube-Kanal- Bitte überprüfen Sie den offiziellen YouTube-Kanal der NSD.
 ON-LINE AUSSTELLUNG
ON-LINE AUSSTELLUNG- Einführung in die NSD Online-Ausstellung.