Binärcode / Gray-Code Output Konverter NCV-20N
Produktbeschreibung

NCV-20N ist ein Konverter für NSD ABSOCODER und kann mit dessen Hilfe Binärcode oder Graycode Signale erzeugen.
![]()
Modellauswahl
NCV-20N[1][2][3]
- [1]Output Code
-
Code Output Code B Binär G Gray
- [2]Output-System
-
Code Output-System N Sink-Typ
- [3]Verwendbarer Sensor
-
Code Verwendbarer Sensor VP VRE-P028/VRE-P062 V2 VRE-16TS062 MP MRE-32SP062/MRE-G□SP062(□ : 64/128/160/256/320) LW VLS-256PWB/VLS-512PWB/VLS-1024PW
Bei Fragen zu den Spezifierungen können Sie uns jederzeit kontaktieren.
ABSOCODER Basiskonfiguration


Spezifikationen
Allgemeine Spezifikationen
| Kategorie | Spezifikationen |
|---|---|
| Versorgungsspannung | 24VDC±10% (inclusive Welligkeit) |
| Stromverbrauch | 7W oder weniger |
| Isolationswiederstand | 20MΩ oder mehr zwischen externen Gleichstromleitungsklemmen und Erdung ( 500 VDC Isulierungsswiederstandstester) |
| Hält Stromspannung stand | 500VAC (Wechselspannung) 60Hz pro minute zwischen externen Gleichstromleitungsklemmen und Erdung |
| Vibrationswiederstand | 20m/s2 10 ~ 500Hz, 10Kreisläufe je 5 minuten in drei Richtungen, gemäß des JIS C 0040 Standards |
| Umgebungsbetriebstemperatur | 0 ~ +55℃ (nicht bei Temperauturen unter 0℃, Umgebungstemperatur von max. 55℃) |
| Umgebungsbetriebsluftfeuchtigkeit | 20 - 90% relative Luftfeuchtigkeit (Keine Kondensierung) |
| Erdung | Sichere Erdung (Wiederstand von 100ohm oder weniger) |
| Konstruktion | eingebauter Regaltyp, DIN Schiene montierbar |
| Außenabmessungen (mm) | 39(W)×155(H)×93(D) |
| Gewicht | ca. 0,4kg |
Leistungsspezifikationen
| Kategorie | Spezifikationen | |||
|---|---|---|---|---|
| Modell | NCV-20NBNVP NCV-20NGNVP |
NCV-20NBNV2 NCV-20NGNV2 |
NCV-20NBNMP NCV-20NGNMP |
NCV-20NBNLW NCV-20NGNLW |
| Anzahl der Erfassungsachsen | 1 | |||
| Positionsdatenerfassungszeit | 0,2ms | |||
| Status des Outputsignals | Latch Impuls (Lesezeit der Positionsdaten): 1 Punkt Sensorenverbindundsfehler (Positive Logik): 1 Punkt Sensorenverbindundsfehler (Negative Logik): 1 Punkt |
|||
| Inputsignal | Positionsdaten-Haltesignal: 1 Punkt | |||
| Bedienfeldfunktion | Aktuelle Positionswerteinstellung | |||
| Schalter (auf der Rückseite des Produkts) |
Einstellung der Positionsdatenerhöhungs/ Abnahmerichtung (CW / CCW): 1 Punkt | |||
| Aktualisierungszyklus der Positionsdaten | Hochgeschwindigkeit | 0,2ms | ||
| 0,4ms | ||||
| Niedriggeschwindigkeit | 12,8ms | |||
| 25,6ms | ||||
| 51,2ms | ||||
| Haltesignalformat | Tranparenzformat | |||
| PC Synchroformat | ||||
| Monitor LED | Anzeige der Sensor-Verbindungsfehler, Anzeige der Positionsdaten Anzeige des Latch-Impulsoutputs, Halten der Statusanzeige des Inputsignals |
|||
Anzahl der Teilungen, Auflösung und Sensorkabellänge des ABSOCODER-Sensors
VRE Single-Turn Drehgeber
| Kategorie | Spezifikationen | ||||
|---|---|---|---|---|---|
| Modell | NCV-20NBNVP | NCV-20NGNVP | NCV-20NBNV2 | NCV-20NGNV2 | |
| Output Code | Binär | Gray | Binär | Gray | |
| Verwendbarer Sensor | VRE-P028, VRE-P062 | VRE-16TS062 | |||
| Gesamtanzahl der Drehungen | 1 | ||||
| Anzahl der Teilungen | 8192 (213) | 65536 (216) | |||
| max. Kabellänge | Standard | 100m | - | ||
| Roboter | 100m | 100m | |||
MRE Multi-Turn Drehgeber
| Kategorie | Spezifikationen | ||||||
|---|---|---|---|---|---|---|---|
| Modell | NCV-20NBNMP | NCV-20NGNMP | |||||
| Output Code | Binär | Gray | |||||
| Verwendbarer Sensor | MRE- 32SP |
MRE- G64SP |
MRE- G128SP |
MRE- G160SP |
MRE- G256SP |
MRE- G320SP |
|
| Gesamtanzahl der Drehungen | 32 | 64 | 128 | 160 | 256 | 320 | |
| Anzahl der Teilungen pro Umdrehung | 2048 | 1024 | 512 | 409,6 | 256 | 204,8 | |
| Anzahl der gesamten Teilungen | 65536 (216) | ||||||
| max. Kabellänge | Standard | 100m | 100m | ||||
| Roboter | 40m | 70m | |||||
VLS Lineargeber
| Kategorie | Spezifikationen | ||||
|---|---|---|---|---|---|
| Modell | NCV-20NBNLW | NCV-20NGNLW | |||
| Output Code | Binär | Gray | |||
| Verwendbarer Sensor | VLS-256PWB | VLS-512PWB | VLS-1024PW | ||
| Auflösung | 0,00781mm | 0,0156mm | 0,03125mm | ||
| Anzahl der gesamten Teilungen | 32768 (215) | ||||
| max. Kabellänge | Standard | 100m | |||
| Roboter | 50m | ||||
Input / Output Spezifikationen
| Kategorie | Spezifikationen | |||||
|---|---|---|---|---|---|---|
| Modell | NCV-20NBNVP NCV-20NGNVP |
NCV-20NBNV2 NCV-20NGNV2 |
NCV-20NBNMP NCV-20NGNMP |
NCV-20NBNLW NCV-20NGNLW |
||
| Input | Inputsignal | HD (Positionsdaten halten, HOLD): 1 Punkt | ||||
| Inputschaltung | DC Input, Fotokoppler-Isolation | |||||
| Inputlogik | Negative Logik | |||||
| Nenn-Inputsspannung | 24VDC±10% | |||||
| Inputsnennstrom | 10mA (24VDC) | |||||
| ON Spannung | 10VDC oder mehr | |||||
| OFF Spannung | 4VDC oder weniger | |||||
| Output | Outputsignal | Positionsdaten | D0 ~ D12:13Punkte | D0 ~ D15:16Punkte | D0 ~ D15:16Punkte | D0 ~ D14:15Punkte |
| LP (Latch-Impuls: Positionsdaten-Lesezeitpunkt): 1 Punkt SE, SE (Sensorenverbindundsfehler): 2 Punkte |
||||||
| Outputschaltung | Transistor (Offener Kollektor) Output, Fotokoppler-Isolation | |||||
| Outputlogik | D0 ~ D15, LP, SE: Negative Logik SE : Positive Logik |
|||||
| Nennlastspannung | 24VDC (30VDC max.) | |||||
| max. Laststrom | D0 ~ D15,LP : 10mA / Punkt SE, SE : 100mA / Punk *1 |
|||||
| max. Spannungsabfall wenn ON | 0,8V oder weniger | |||||
*1 : SE and SE Signale benötigen externe Versorgungsspannung (24VDC±10%)
Außenabmessungen

- Das Funktionsprinzip von ABSOCODER
- ABSOCODER Produktübersicht
- Konverter
- VARICAM®
- VARILIMIT®
- SPS Modulkonverter
- Netzwerkkontroller
- Netzwerkkontroller 2
- Positionierungskontroller
- Hochleistungskonverter
- Hochleistungspulskonverter ABSO PULPUL®
- Hochleistungs-
impulskonverter NP-SCALE - Hochleistungs-
endschalter Output Kontroller VARILIMIT® - Hochleistungs
SPS Modulkonverter - Hochleistungs-
netzwerkkontroller - Sonstige Produkte für die Schwerindustrie
- Single-Turn Drehgeber
- Multi-Turn Drehgeber
- Linearer Positionssensor
- Zylinder zur linearen Positionserfassung
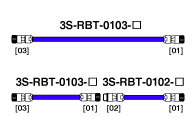
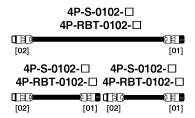
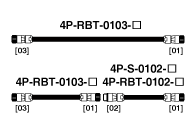
- Sensorenverlängerungskabel
- ezABSO® Puls-Typ
- ezABSO® Netzwerk-Typ
- Magnetischer Näherungssensor
- Zugkraftsensoren
- Wirbelstrom-Wegsensor
- Sensoren mit Explosionsschutz
- Gemeinsam entwickelte Produkte
- Schleifringe und drahtlose Übertragungsgeräte
- Produkterneuerung
- Kundenspezifische Lösungen
- Parameter Software


 Internationales Netzwerk
Internationales Netzwerk- NSD ist immer da wenn wir gebraucht werden.
 Das Funktionsprinzip von ABSOCODER
Das Funktionsprinzip von ABSOCODER- Einführung in das Funktionsprinzip des ABSOCODER.
 Unternehmens-
Unternehmens-
geschichte- Einführung in die Unternehmens-
geschichte der NSD Group.
 Anwendungs-
Anwendungs-
möglichkeiten- Hier finden Sie eine Übersicht über die Anwendungs-
möglichkeiten unseres ABSOCODERs.
 Sensorenverlängerungs-
Sensorenverlängerungs-
kabel- Hier finden Sie einen Überblick über unsere Sensorenverlängerungs-
kabel.
 NSD YouTube-Kanal
NSD YouTube-Kanal- Bitte überprüfen Sie den offiziellen YouTube-Kanal der NSD.
 ON-LINE AUSSTELLUNG
ON-LINE AUSSTELLUNG- Einführung in die NSD Online-Ausstellung.