Heavy Duty Multi-turn type ABSOCODER Sensor MRE®
Description

NSD multi turn absolute position sensor named MRE ABSOCODER is an electro-mechanical sensor that measures the angular position under magnetic reluctance change. True heavy duty MRE series has been proven its excellent performance and durability at actual production field under high shock, high temperature and high speed vibration
![]()
Model coding

| ①Sensor model |
②Number of turns |
③Shape | ④Phase type |
⑤Mounting | ⑥Input shaft |
⑦Connector type |
⑧Interconnecting sensor cable (m) |
⑨Silicon oil injected |
|---|---|---|---|---|---|---|---|---|
| MRE | 32 | S | P061 | F | K | B | - | - |
| 32 | S | P074 | F | K | B | 2 | -G | |
| 32 | S | P101 | F | K | B | 2 | -G | |
| 1024 | S | 16TS100 | F | K | P | 2 | -G |
![]() image select the required specification.
image select the required specification.
- ①Sensor model
- MRE[Multi-turn type]
- ②Number of turns
-
SP061, SP074 SP101 1024S16TS100 32 : 32 turns
G64 : 64 turns
G128 : 128 turns
G160 : 160 turns
G256 : 256 turns
G320 : 320 turns32 : 32 turns
G64 : 64 turns
G128 : 128 turns
G160 : 160 turns
G256 : 256 turns
G320 : 320 turns
G512 : 512 turns
G1280 : 1280 turns
G2048 : 2048 turns
G2560 : 2560 turns
G3072 : 3072 turns1024 : 1024 turns
- ③Shape
- S[Cylinder type]
- ④Phase type
- P[Standard type] 16TS[High-resolution type]
- ⑤Mounting
- F[Fiange-mount type] L[Base-mount type] M[Face-mount type (Only 074)]
- ⑥Input shaft
- K[Sunk key]
- ⑦Connector type
-
- B[Standard connector for NSD standard cable]
- R[Terminals for commercially available cable and NSD standard cable]
- P[Large connector for JKPEV-S cable]
(Only MRE-1024S16TS100 selectable)
- ⑧Interconnecting sensor cable (m)
- 2[2m] 5[5m] 10[10m] 15[15m] 20[20m]
MRE-□SP061:only by 2m - ⑨Silicon oil injected
- G[Silicon oil injected] Blank[None]
- The MRE-G sensor allow for a slight backlash due to the reducing gear.
![Mounting F[Fiange-mount type] L[Base-mount type] M[Face-mount type] Input shaft K[Sunk key] Connector type B[Standard connector] R[Crimp-type terminal] P[Large connector]](images/image02a.gif)
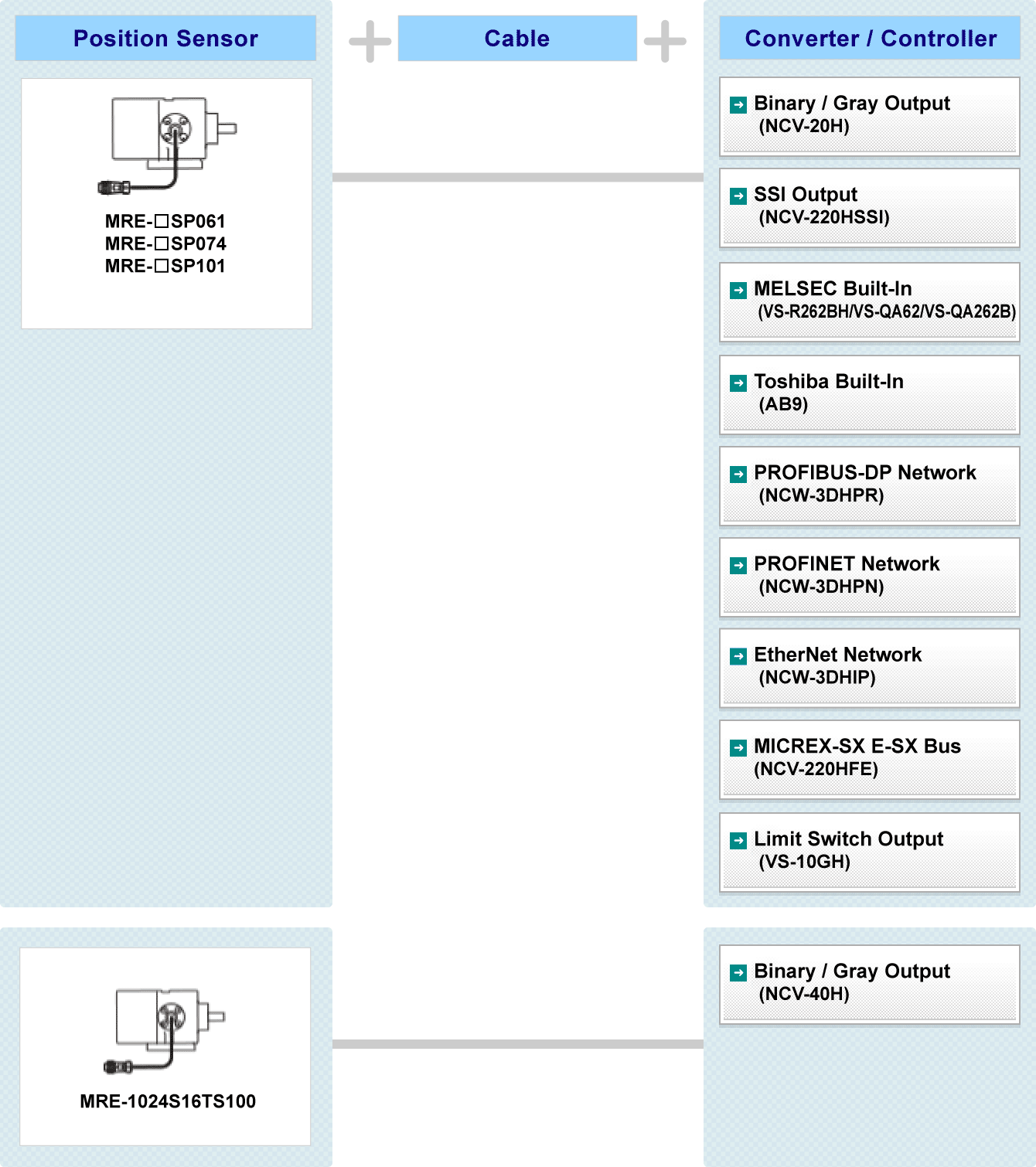
System Configuration
Specification
| Item | Specification | ||||||
|---|---|---|---|---|---|---|---|
| Sensor model | MRE-□SP061 | ||||||
| Total number of turns | 32 | G64 | G128 | G160 | G256 | G320 | |
| Divisions/Turn | 2048 | 1024 | 512 | 409.6 | 256 | 204.8 | |
| Total number of divisions | 65536(216) (NCV-20HBNM2R) |
||||||
| Mass(kg) | 1.5 | 1.0 | |||||
| Linearity error(°degree) | 0.7 Max. | 1.4 Max. | 2.8 Max. | 3.5 Max. | 5.6 Max. | 7.0 Max. | |
| Moment of inertia | kg・m2 {kgf・cm・s2} | 6.7×10-6{6.8×10-5} | 3.9×10-6{4.0×10-5} | ||||
| Starting torque | N・m{kgf・cm} | 4.9×10-2 {0.5} or less | |||||
| Permissible shaft load | Radial(N {kgf}) | 98{10} | |||||
| Thrust(N {kgf}) | 49{5} | ||||||
| Permissible mechanical speed | 2000 | 3600 | |||||
| Bearing life(h) | 4.5×104(at 2000r/min) | 1.5×104(at 3600 r/min) | |||||
| Ambient temperature | Operating(℃) | -20〜+80 | |||||
| Storage(℃) | -30〜+90 | ||||||
| Vibration resistance | 2.0×102m/s2 {20G} 200Hz up /down 4h, forward/back 2h, conforms to JIS D1601 standard |
98m/s2 {10G} 200Hz up /down 4h, forward/back 2h, conforms to JIS D1601 standard |
|||||
| Shock resistance | 4.9×103m/s2 {500G} 0.5ms up/down/forward/back 3 times each, conforms to JIS C5026 standard |
2.9×103m/s2 {300G} 0.5ms up/down/forward/back 3 times each, conforms to JIS C5026 standard |
|||||
| Protection rating | IP65(JEM1030) | ||||||
| Max. sensor cable length |
Standard cable (m) | 200(4P-S) | 300(4P-S) | ||||
| Robotic cable (m) | 100(4P-RBT) | 150(4P-RBT) | |||||
| JKPEV-S cable (m) | 200(1.25mm2×5P) | 300(1.25mm2×5P) | |||||
| Interconnecting sensor cable (m) | 2 | ||||||
| Item | Specification | ||||||
|---|---|---|---|---|---|---|---|
| Sensor model | MRE-□SP074 | ||||||
| Total number of turns | 32 | G64 | G128 | G160 | G256 | G320 | |
| Divisions/Turn | 2048 | 1024 | 512 | 409.6 | 256 | 204.8 | |
| Total number of divisions | 65536(216) (NCV-20HBNM2R) |
||||||
| Mass(kg) | 5.5+0.1×cable length(m) | ||||||
| Linearity error(°degree) | 0.6 Max. | 1.2 Max. | 2.4 Max. | 3.0 Max. | 4.8 Max. | 6.0 Max. | |
| Moment of inertia | kg・m2 {kgf・cm・s2} | 3.3×10-5{3.4×10-4} | |||||
| Starting torque | N・m{kgf・cm} | 9.8×10-2 {1} or less | |||||
| Permissible shaft load | Radial(N {kgf}) | 98{10} | |||||
| Thrust(N {kgf}) | 49{5} | ||||||
| Permissible mechanical speed | 4000 | ||||||
| Bearing life(h) | 8×104(at 4000r/min) | ||||||
| Ambient temperature | Operating(℃) | -20〜+120 | |||||
| Storage(℃) | -30〜+120 | ||||||
| Vibration resistance | 2.0×102m/s2 {20G} 200Hz up /down 4h, forward/back 2h, conforms to JIS D1601 standard |
||||||
| Shock resistance | 4.9×103m/s2 {500G} 0.5ms up/down/forward/back 3 times each, conforms to JIS C5026 standard |
||||||
| Protection rating | IP67(JEM1030) IP69K(ISO20653) |
||||||
| Max. sensor cable length |
Standard cable (m) | 300(4P-S) | |||||
| Robotic cable (m) | 150(4P-RBT) | ||||||
| JKPEV-S cable (m) | 300(1.25mm2×5P) | ||||||
| Interconnecting sensor cable (m) | 2, 5, 10, 15, 20 | ||||||
| Item | Specification | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Sensor model | MRE-□SP101 | |||||||||||
| Total number of turns | 32 | G64 | G128 | G160 | G256 | G320 | G512 | G1280 | G2048 | G2560 | G3072 | |
| Divisions/Turn | 2048 | 1024 | 512 | 409.6 | 256 | 204.8 | 128 | 51.2 | 32 | 25.6 | 21.3 | |
| Total number of divisions | 65536(216) (NCV-20HBNM2R) |
|||||||||||
| Mass(kg) | 7+0.1×cable length(m) | |||||||||||
| Linearity error(°degree) | 0.6 Max. | 1.2 Max. | 2.4 Max. | 3.0 Max. | 4.8 Max. | 6.0 Max. | 9.6 Max. | 24 Max. | 38.4 Max. | 48 Max. | 56 Max. | |
| Moment of inertia | kg・m2 {kgf・cm・s2} |
3.3×10-5{3.4×10-4} | ||||||||||
| Starting torque | N・m {kgf・cm} |
9.8×10-2 {1} or less | ||||||||||
| Permissible shaft load | Radial(N {kgf}) | 1.5×102{15} | ||||||||||
| Thrust(N {kgf}) | 78{8} | |||||||||||
| Permissible mechanical speed | 4000 | |||||||||||
| Bearing life(h) | 8×104(at 4000r/min) | |||||||||||
| Ambient temperature | Operating(℃) | -20〜+120 | ||||||||||
| Storage(℃) | -30〜+120 | |||||||||||
| Vibration resistance | 2.0×102m/s2 {20G} 200Hz up /down 4h, forward/back 2h, conforms to JIS D1601 standard |
|||||||||||
| Shock resistance | 4.9×103m/s2 {500G} 0.5ms up/down/forward/back 3 times each, conforms to JIS C5026 standard |
|||||||||||
| Protection rating | IP67(JEM1030) IP69K(ISO20653) |
|||||||||||
| Max. sensor cable length |
Standard cable (m) | 300(4P-S) | ||||||||||
| Robotic cable (m) | 150(4P-RBT) | |||||||||||
| JKPEV-S cable (m) | 300 (1.25mm2×5P) | |||||||||||
| Interconnecting sensor cable (m) | 2, 5, 10, 15, 20 | |||||||||||
Number of divisions
Division numbers of the sensor are different depending on which converter or controller is being used together.Please check the division numbers per turn by specifications of the converter or controller that you plan to use.
| Item | Specification | |
|---|---|---|
| Sensor model | MRE-1024S16TS100 | |
| Total number of turns | 1024 | |
| Divisions/Turn | 65536 | |
| Total number of divisions | 67108864(226) (NCV-40H) |
|
| Mass(kg) | 8+0.2×cable length(m) | |
| Linearity error(°degree) | 0.084 Max. | |
| Moment of inertia | kg・m2 {kgf・cm・s2} | 4.1×10-5 {4.2×10-4} |
| Starting torque | N・m{kgf・cm} | 9.8×10-2 {1} or less |
| Permissible shaft load | Radial(N {kgf}) | 1.5×102{15} |
| Thrust(N {kgf}) | 78 {8} | |
| Permissible mechanical speed | 4000 | |
| Bearing life(h) | 8×104(at 4000r/min) | |
| Ambient temperature | Operating(℃) | -20〜+120 |
| Storage(℃) | -30〜+120 | |
| Vibration resistance | 2.0×102m/s2 {20G} 200Hz up /down 4h, forward/back 2h, conforms to JIS D1601 standard |
|
| Shock resistance | 4.9×103m/s2 {500G} 0.5ms up/down/forward/back 3 times each, conforms to JIS C5026 standard |
|
| Protection rating | IP67(JEM1030) IP69K(ISO20653) |
|
| Max. sensor cable length |
Standard cable (m) | 300(5S-SLA) |
| Robotic cable (m) | 100(5S-RBT) | |
| Interconnecting sensor cable (m) | 2, 5, 10, 15, 20 | |
Number of divisions
Division numbers of the sensor are different depending on which converter or controller is being used together.Please check the division numbers per turn by specifications of the converter or controller that you plan to use.
Dimensions
Standard type
 MRE-32SP061
MRE-32SP061
MRE-G□SP061- MRE-□SP074
- MRE-□SP101
High-resolution type
- MRE-1024S16TS100
Application Introduction

- Principle of ABSOCODER
- Full Line-Up of ABSOCODER
- Single Turn Rotary Position Sensor
- Multi Turn Rotary Position Sensor
- Linear Position Sensor
- Smart Linear Position Sensing Cylinder
- ABSOCODER Built-In Sensing Products
- Extension Sensor Cable
- ezABSO® Pulse Series
- ezABSO® Network Series
- ezABSO® Network Series
CC-Link IE TSN - Magnetic Proximity Sensor
- Tension Measurement
- Eddy Current Displacement Sensor
- Explosion Proof Solution
- Joint Development Products
- Slip-Ring and Wireless Transfer Device
- Renewal Solution
- Customized NSD Solution
- Parameter Software


 Explore a Career at NSD
Explore a Career at NSD- Work With NSD
 Global Network
Global Network- NSD is where the customer needs are
 Principle of ABSOCODER
Principle of ABSOCODER- Please check the creative principle of NSD ABSOCODER
 NSD HISTORY
NSD HISTORY- Preparation for a better future and for the next generation
 Major Application
Major Application- Please check the wide-use ABSOCODER's application
 Extension Sensor Cable
Extension Sensor Cable- Please check the extension sensor cable for ABSOCODER
 NSD YouTube Channel
NSD YouTube Channel- Please check the NSD official YouTube channel
 ON-LINE EXHIBITION
ON-LINE EXHIBITION- Introducing the NSD on-line exhibition
 ON-LINE MEETING
ON-LINE MEETING- NSD on-line meeting service page