Positioning output controller
Description
Motion Control is a sub-field of process / product automation, in which the position or velocity of system. This is an important part of robotics and factory automation system. NSD motion control solution, higher performance with field proven excellent durability, excels in any situation where motion control plays a role.
![]()
![]()
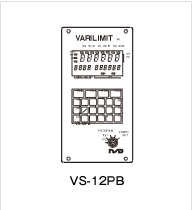
VS-12PB
VS-12PB is NSD standard controller for motion control system which is connecting with general purpose motors to perform control the motor movement as motion control role.
ADVANTAGE
- Installed with general motion control functions for instance rotation direction, speed degree, break release, and switch output control.
- 8 points of limit switch output
- User friendly digital function setting and display

Model coding
VS-12PB-[1][2]
- [1]Applicable sensor
-
Code Absocoder Sensor M2PG MRE-32SP062/MRE-G□SP062(□ : 64/128/160/256/320) L VLS-256PWB/VLS-512PWB/VLS-1024PW/VLS-512PYB/VLS-1024PYB/VLS-2048PY - [2]External BCD I / O
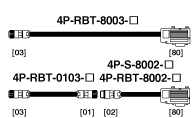
-
Code Specification Blank None D With external BCD I / O
Contact us about other specifications.
ABSOCODER Basic Configuration

Specification
General specification
| Item | Specification |
|---|---|
| Power supply voltage | 100VAC 50/60Hz |
| Permissible power voltage range |
85 ~ 132VAC |
| Power consumption | 15VA or less |
| Ambient operating temperature |
0 ~ +55℃(No freezing) |
| Ambient operating humidity |
20 ~ 90 %RH (No condensation) |
| Insulation resistance | 20MΩ or more between external AC power terminals and ground (by 500 VDC insulation resistance tester) |
| Withstand voltage | 1500 VAC, 60Hz for 1 minute |
| Vibration resistance | 20m/s2 10 ~ 500Hz, 10cycles of 5 minutes in 3 directions, conforms to JIS C 0040 standard |
| Mass | 2.0 Kg |
Performance Specification
| Items | Specifications | ||||||
|---|---|---|---|---|---|---|---|
| Controller model | VS-12PB-M2PG VS-12PB-M2PGD |
VS-12PB-L VS-12PB-LD |
|||||
| Applicable sensor | MRE-32SP062 | MRE-G□SP062 | VLS-256PWB,VLS-512PWB, VLS-1024PW,VLS-512PYB VLS-1024PYB,VLS-2048PY |
||||
| Position detection format | Absolute position detection | ||||||
| Number of divisions | 4096 Divisions × 32 Turns ~ 409.6 Divisions × 320 Turns |
- | |||||
| Resolution | - | VLS-256PWB:0.00391mm VLS-512PWB:0.00781mm VLS-1024PW:0.0156mm VLS-512PYB:0.00391mm VLS-1024PYB:0.00781mm VLS-2048PY:0.0156mm |
|||||
| Number of detection axes | 1 | ||||||
| Data setting method | Key input at panel, communication, external BCD input | ||||||
| Positioning function |
Control format | Unidirectional positioning or Bidirectional positioning | |||||
| Control output | Forward (FWD), Reverse (RVS), High-speed, Low-speed, Brake release, In-position, Positioning in progress, Operation error |
||||||
| Switch output function |
Number of programs |
1 | |||||
| Number of switch outputs |
8 | ||||||
| Number of multi-dogs |
10 times for each switch output | ||||||
| Sampling time | Switch output Positioning output |
1ms | |||||
| Current position output |
n × 4ms(n = 0 ~ 64 by parameter setting) | ||||||
| Setting value memory | Non-volatile memories (EEPROM) | ||||||
| Auxiliary functions | Current position detection, positioning function, switch outputs, protected switches, current position preset, JOG operation, Self-diagnosis |
||||||
| Max. sensor cable length |
Standard(S) | 100m | 100m | VLS-□PWB:100m VLS-□PYB:60m |
VLS-1024PW:100m VLS-2048PY:60m |
||
| Robotic(RBT) | 40m | 70m | VLS-□PWB:50m VLS-□PYB:30m |
VLS-1024PW:50m VLS-2048PY:30m |
|||
I/O spcification
| Item | Input specifications | |
|---|---|---|
| Input signals | Start signal, etc. ...10 points | Target stop position BCD input...26 points |
| Input circuit | DC input, photo-coupler isolation | |
| Input logic | Negative logic | |
| Rated input voltage | 24VDC | |
| Rated input current | 10mA | |
| Voltage range to be used | 20.4V ~ 30VDC | |
| ON voltage | 12 VDC or more | |
| OFF voltage | 4 VDC or less | |
| Output signals | Control output...19 points | Current position BCD output...26 points |
| Output circuit | Transistor (open-collector), photo-coupler isolation | |
| Output logic | Negative logic | |
| Rated load voltage | 24 VDC (30 VDC Max.) | |
| Max. load current | 100mA | |
| Max. voltage drop when ON | 0.5V or less | |
Dimensions
Application Introduction

- Principle of ABSOCODER
- Full Line-Up of ABSOCODER
- Converter
- VARICAM®
- VARILIMIT®
- PLC Module Converter
- Network Solution Controller
- Network Solution Controller 2
- Positioning output controller
- Heavy Duty Converter
- Heavy Duty ABSO PULPUL®
- Heavy Duty NP-SCALE
- Heavy Duty VARILIMIT®
- Heavy Duty PLC Module Converter
- Heavy Duty Network Solution Controller
- Heady Duty Solutions
- Single Turn Rotary Position Sensor
- Multi Turn Rotary Position Sensor
- Linear Position Sensor
- Smart Linear Position Sensing Cylinder
- ABSOCODER Built-In Sensing Products
- Extension Sensor Cable
- ezABSO® Pulse Series
- ezABSO® Network Series
- ezABSO® Network Series
CC-Link IE TSN - Magnetic Proximity Sensor
- Tension Measurement
- Eddy Current Displacement Sensor
- Explosion Proof Solution
- Joint Development Products
- Slip-Ring and Wireless Transfer Device
- Renewal Solution
- Customized NSD Solution
- Parameter Software


 Explore a Career at NSD
Explore a Career at NSD- Work With NSD
 Global Network
Global Network- NSD is where the customer needs are
 Principle of ABSOCODER
Principle of ABSOCODER- Please check the creative principle of NSD ABSOCODER
 NSD HISTORY
NSD HISTORY- Preparation for a better future and for the next generation
 Major Application
Major Application- Please check the wide-use ABSOCODER's application
 Extension Sensor Cable
Extension Sensor Cable- Please check the extension sensor cable for ABSOCODER
 NSD YouTube Channel
NSD YouTube Channel- Please check the NSD official YouTube channel
 ON-LINE EXHIBITION
ON-LINE EXHIBITION- Introducing the NSD on-line exhibition
 ON-LINE MEETING
ON-LINE MEETING- NSD on-line meeting service page